在这项最新的研究中,来自南洋理工大学的研究团队介绍了一项名为InsActor的创新性生成框架。该框架旨在通过使用先进的扩散式人体运动模型,以指令驱动的方式生成基于物理的角色动画。
研究指出,尽管生成具有直观控制的基于物理的角色动画一直是一项令人向往的任务,但由于物理环境的复杂性和人类语言的丰富性,生成反映高级人类指令的物理模拟动画仍然是一个困难的问题。
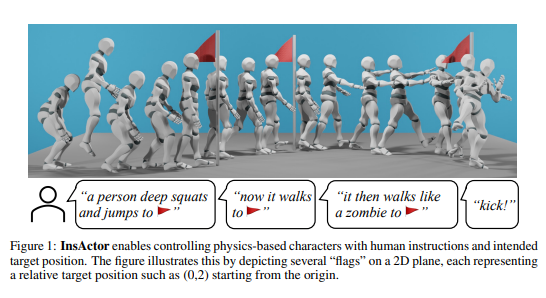
为了解决这个问题,InsActor采用了一种有原则的生成框架,利用了最新的扩散式人体运动模型的进展。该框架通过使用扩散策略进行灵活条件化的运动规划,使InsActor能够捕捉高级人类指令与角色动作之间的复杂关系。
为了克服计划运动中的无效状态和不可行状态转换,InsActor发现了低级技能,并将计划映射到紧凑的潜在空间中的潜在技能序列。文章强调,InsActor在各种任务上取得了最先进的结果,包括指令驱动的运动生成和指令驱动的航点导向。
的实验证明,InsActor能够生成在执行丰富指令的长时任务中非常有价值的物理模拟动画。此外,由于扩散模型的灵活性,动画可以通过加入额外条件(例如航点)进行定制,展示了InsActor的广泛适用性。
InsActor不仅能够生成视觉上引人注目的动画,忠实地遵循指令,同时保持物理可行性,还作为语言条件的基准为基于物理的动画生成提供了重要的基础。

研究也指出了InsActor的一些局限性,如扩散模型的计算复杂性可能对将方法扩展到更复杂环境和更大数据集提出挑战。在最后,文章表示InsActor的能力使其成为未来指令驱动的基于物理的动画发展的重要基准。
项目网址:https://github.com/jiawei-ren/insactor
本文来源于#站长之家,由@tom 整理发布。如若内容造成侵权/违法违规/事实不符,请联系本站客服处理!
该文章观点仅代表作者本人,不代表本站立场。本站不承担相关法律责任。
如若转载,请注明出处:https://www.zhanid.com/news/406.html